四旋翼无人机建模与仿真(Mathematica/Matlab)
2018-09-15
本博客所有文章采用的授权方式为 自由转载-非商用-非衍生-保持署名 ,转载请务必注明出处,谢谢。
声明:
本博客欢迎转发,但请保留原作者信息!
博客地址:焦海林的博客;
内容系本人学习、研究和总结,如有雷同,实属荣幸!
四旋翼无人机建模与仿真(Mathematica/Matlab)
1. 四旋翼的数学模型
四旋翼无人机的受力模型如下图所示,
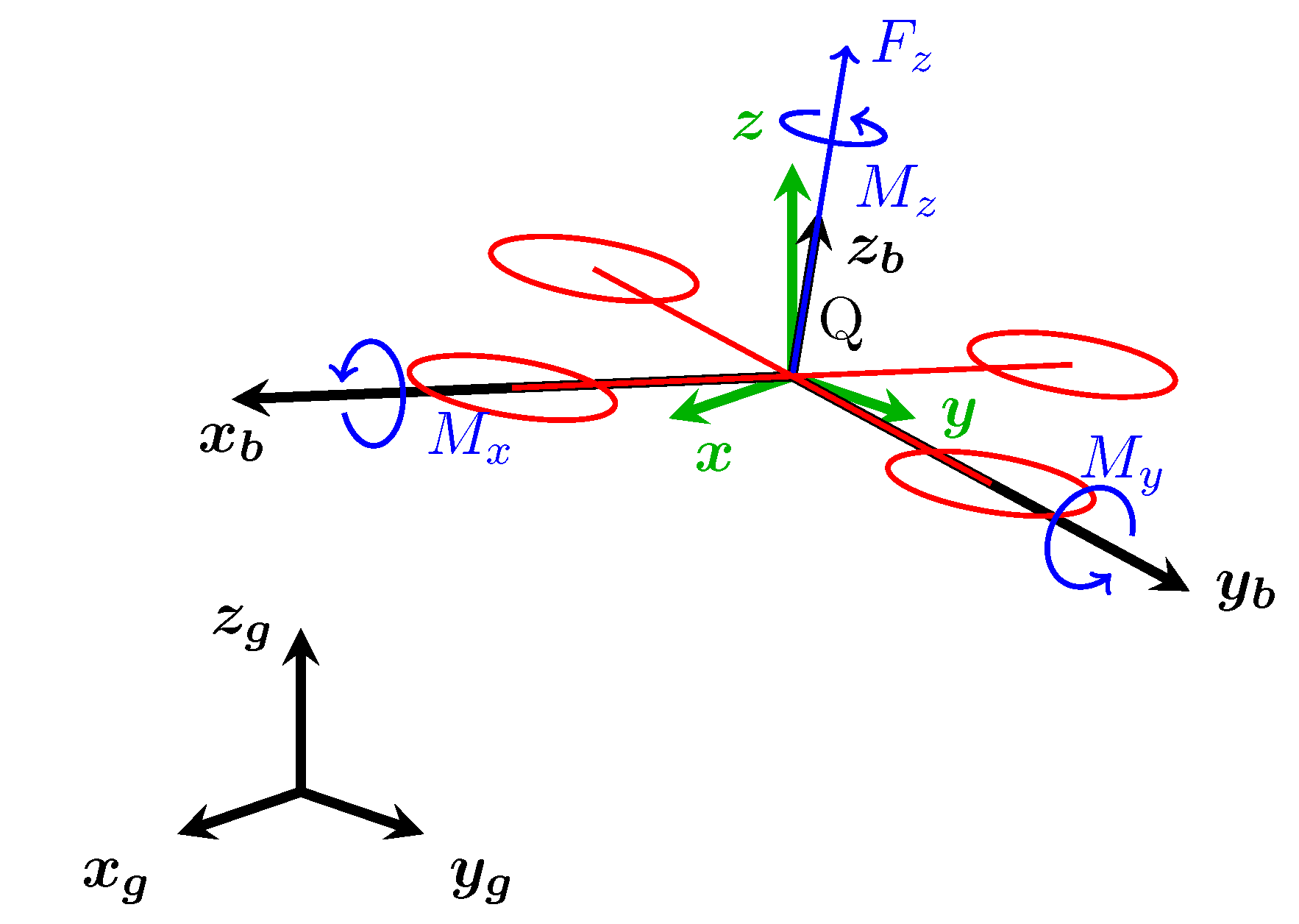
Fig. 1: 四旋翼无人机示意图
1.1 坐标系
- 地面坐标系(惯性坐标系)—— 该坐标系的三个正交单位基向量记作。
- 机体坐标系—— 该坐标系的三个正交单位基向量记作${\bf{e}_x,\bf{e}_y,\bf{e}_z}$。
- 过渡坐标系—— 代表以四旋翼无人机的质心Q为原点,方向与${\mathscr{G}}$相同的过渡坐标系。
1.2 四旋翼无人机的位置、姿态角
- 四旋翼无人机的位置 记作,
- 四旋翼无人机的姿态角 按照”横滚-俯仰-偏航’‘的顺序定义为。
1.3 四旋翼无人机的控制输入
-
螺旋桨转速
四旋翼无人机是通过四个电机带动螺旋桨进行控制的,每个螺旋桨在机体坐标系内形成一个升力和一个力矩,其方向均沿着方向,大小与螺旋桨转速的二次方成正比,
其中,下标表示四个螺旋桨,表示螺旋桨的转速,和是与螺旋桨的尺寸和类型相关的物理参数。
-
等效力和等效力矩
通过将四个螺旋桨产生的升力和力矩进行线性组合,可以得到作用在机体坐标系内的力和力矩,即
其中,为从螺旋桨中心到四旋翼无人机几何中心的距离。
因此为了方便起见,将直接以等效力和等效力矩作为四旋翼无人机的控制输入变量。
1.4 Euler-Lagrange建模
-
广义坐标
为了用Euler-Lagrange方法建立该系统的动力学模型,首先需要选择该系统的广义坐标。该系统有6个自由度,选择广义坐标。
-
广义力
与广义坐标对应的广义力为,
注:
-
动能、势能和Lagrangian
因此,作为6自由度刚体,四旋翼无人机的动能、势能和Lagrangian可分别写为
- Euler-Lagrange方程
式\eqref{a}
